Carnegie Mellon University Develops New Robot Leg Technology
( worldrobotconference.com )
As human engineers make ceaseless efforts in research and development of machine, someday human being, the creature dominating the earth, will be replaced. We have created many robots which can walk, run, climb and swim. Now, we have robot which can leap. As reported by The Verge on Aug. 18, Simon Kalouche, a researcher of Carnegie Mellon University developed a kind of new robot leg technology – goat leg.
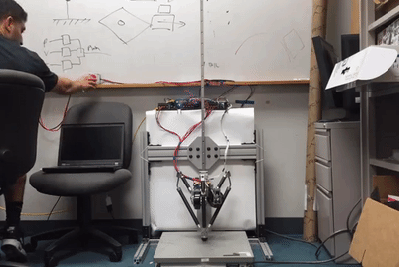
The report says it is called goat leg not just because the robot can leap like goat. Goat here means the “Gearless Omni-directional Acceleration-vectoring Topology”, and it can make robot imitate human to avoid falling in case of rough terrain by fine adjustment.

The design of goat leg can better cope to dynamic movements. For changing scenes, human and animals can respond favorably, while robots cannot. The tripod-like leg can move toward any direction. Such design can enable the robot to better pass through rugged landform, leap over ditches so that the applied landform range of robot can be increased greatly. However, currently the goat leg is still in early test stage. Kalouche wishes multiple varieties of robots can adopt the goat leg design in the future.
 The Area with Six Parks
The Area with Six Parks Global Top 500
Global Top 500